Merupakan proyek inovasi kolaborasi lintas Prodi antara Teknik Komputer dan Teknik Elektro bekerja sama dengan BBP Mekanisasi Pertanian Tangerang Selatan sebagai pengguna sistem. Secara umum sistem secara keseluruhan digunakan sebagai sistem pemantauan kondisi perkebunan dan mengatur proses irigasi secara otomatis melalui antarmuka web.
Secara umum, website ini dirancang untuk memberikan kapabilitas bagi pengguna dalam memantau kondisi perkebunan dan mengatur proses irigasi melalui antarmuka web.
Fungsionalitas website ini terbagi ke dalam tiga buah modul utama di bawah ini.
Manage Farm => Monitoring terhadap status sensor & actuator, mengontrol actuator, serta menjadwalkan irigasi otomatis.
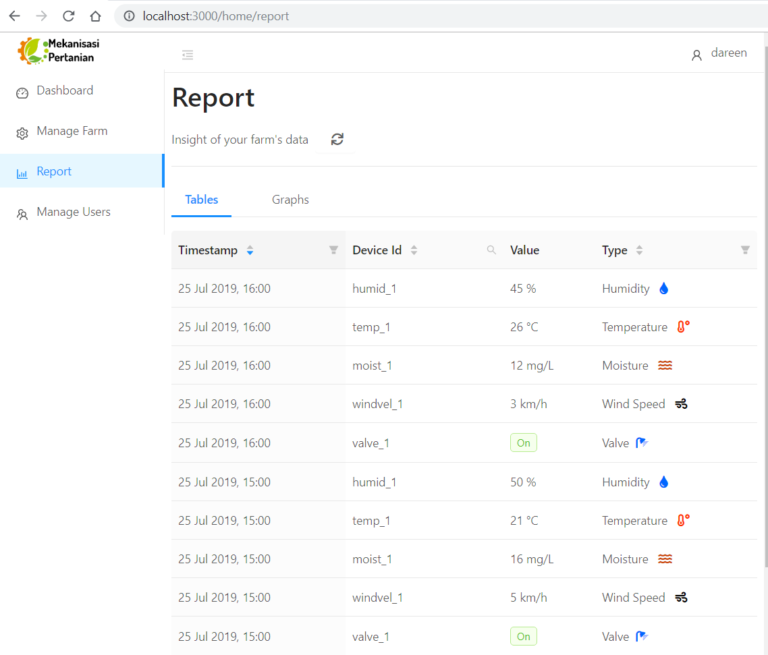
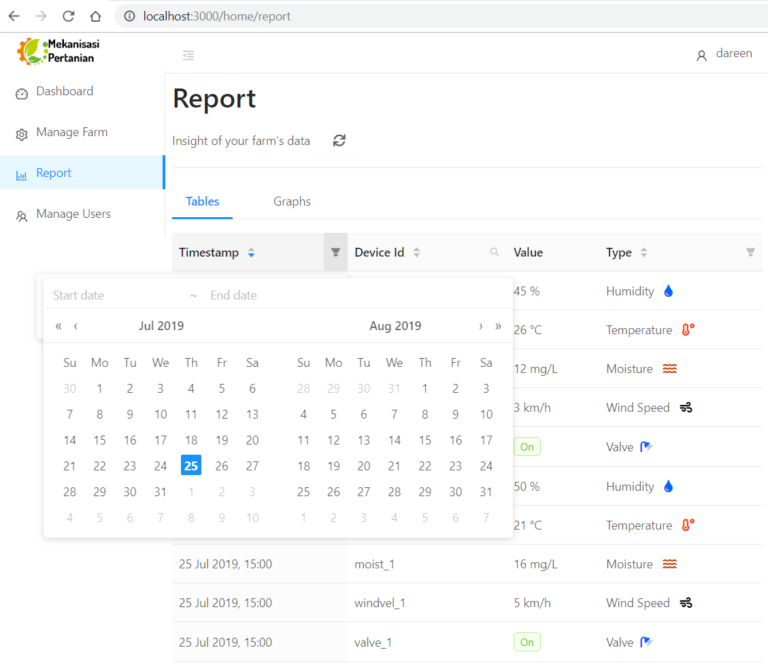
Report => Melihat log dari status sensor & actuator yang dikumpulkan setiap jam. Berisi seluruh data sejak sistem ini aktif.
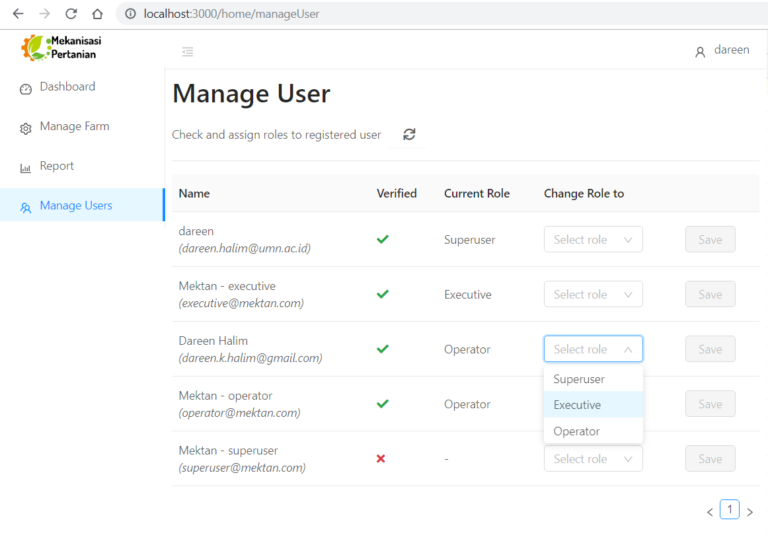
Manage Users => Mengatur peran dari setiap akun pengguna yang mendaftar ke dalam sistem.
Dosen yang terlibat dalam penelitian ini antara lain : 1. Aminuddin Rizal – Teknik Komputer 2. Dareen Halim – Teknik Komputer 3. Dyah Ayu Anggreini – Teknik Elektro
Perancangan Dan Implementasi Mesin Sortir Biji Kopi Otomatis Menggunakan Fuzzy Logic Controller
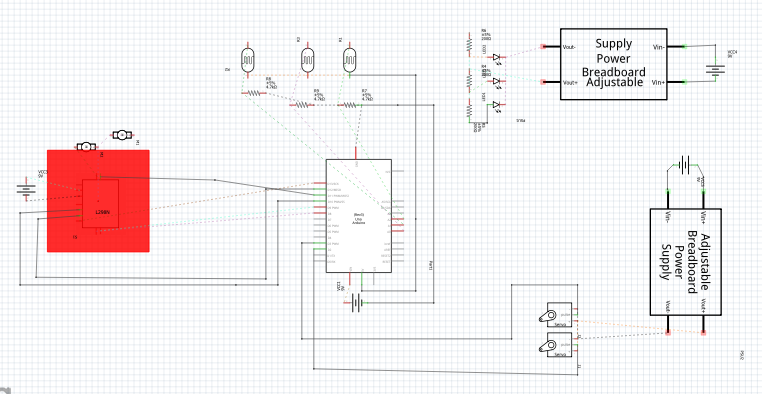
Dalam perkembangan industri kopi pada saat ini, membutuhkan juga perkembangan tidak hanya dari segi penyajian namun langkah-langkah sebelum itu juga harus diperhatikan. Salah satunya adalah alat mesin sortir biji kopi otomatis ini untuk memecahkan permasalahan dalam melakukan pemilahan pada biji kopi setelah dipanggang, pemilahan ini dilakukan dengan cara memantulkan cahaya ke biji kopi sehingga sensor LDR dapat menangkap tingkat kecerahan dari biji kopi tersebut. Setelah mendapatkan hasil tingkat kecerahan, biji kopi akan dipilah dengan servo sebagai aktuatornya.
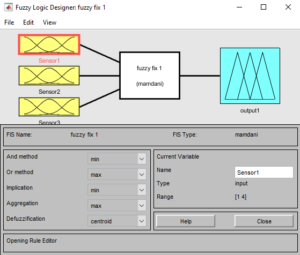
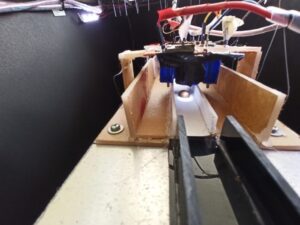
Permasalahan yang dipecahkan dalam skripsi ini adalah sisi efektifitas dalam pemilahannya. Oleh karena itu, dibuat suatu lintasan agar biji kopi dapat dideteksi satu demi satu sehingga, tingkat akurasi dari segi kecerahan biji kopi tersebut dapat lebih baik. Arduino Uno digunakan sebagai mikroprosessor untuk memproses bacaan dari sensor LDR yang sudah dilewati oleh biji kopi tersebut. Setelah itu, biji kopi akan masuk ke klasifikasi tertentu, dan hasilnya akan ditentukan berdasarkan fuzzy rules dan tahap defuzzifikasi akan menentukan kinerja servo pemilah
Peneliti yang terlibat dalam penelitian ini antara lain : 1. Eldo Ramadhan – Mahasiswa Teknik Elektro 2. M.B. Nugraha – Teknik Komputer
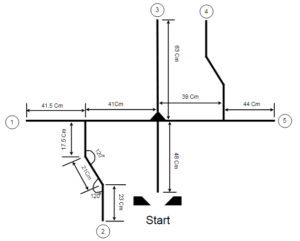
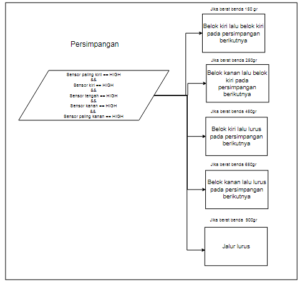
Implementasi Fungsi Mapping Pada Multi Track Line Follower Mobile Robot Dalam Manajemen Logistik
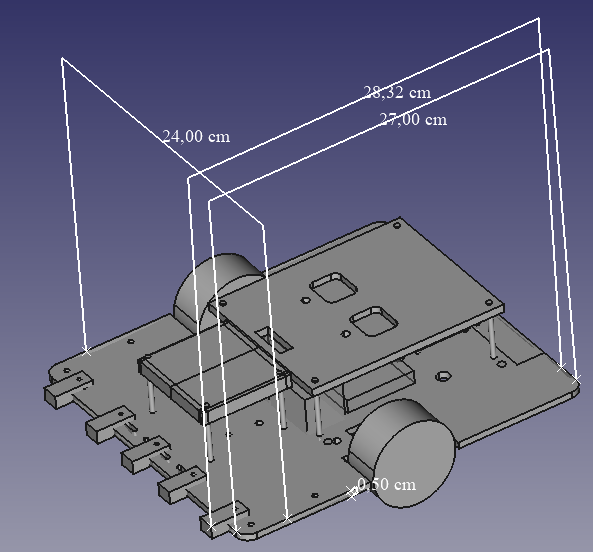
Mobile robots sudah mulai dimanfaatkan sebagai alat untuk pengambilan dan penyimpanan barang pada bagian pergudangan di area industri, mobile robots yang digunakan untuk penyimpanan dan pengambilan barang ini menggunakan sensor berat dan sensor inframerah untuk menentukan jalur yang akan ditempuh. Setiap benda memiliki karakteristik yang beragam, karakteristik yang dimaksud adalah dari dimensi dan berat dari benda. Maka robot ini dirancang agar dapat menangani barang dengan karakteristik tersebut secara tepat. Agar pergerakan dari robot ini stabil, maka fungsi mapping akan diterapkan pada mobile robot.
Mapping dapat menyesuaikan berat benda yang sedang dideteksi dengan nilai PWM yang akan digunakan pada motor, sehingga kecepatan motor dapat disesuaikan dengan berat benda yang sedang dibawa, sehingga ketika robot bergerak, gerakan yang dihasilkan agar robot dapat bergerak lurus ataupun berbelok akan lebih stabil. Stabil yang dimaksud adalah error yang disebabkan dari pergerakan kecepatan pada aktuator dapat dikurangi, sehingga pergerakan dari robot ini menjadi stabil. Robot ini dirancang untuk bekerja pada ruangan tertutup, dikarenakan aplikasi pada robot ini akan difokuskan penggunaannya didalam gudang, ataupun pabrik.
Peneliti yang terlibat dalam penelitian ini antara lain : 1. Sandy Prawira – Mahasiswa Teknik Elektro 2. Rangga Winantyo – Teknik Elektro
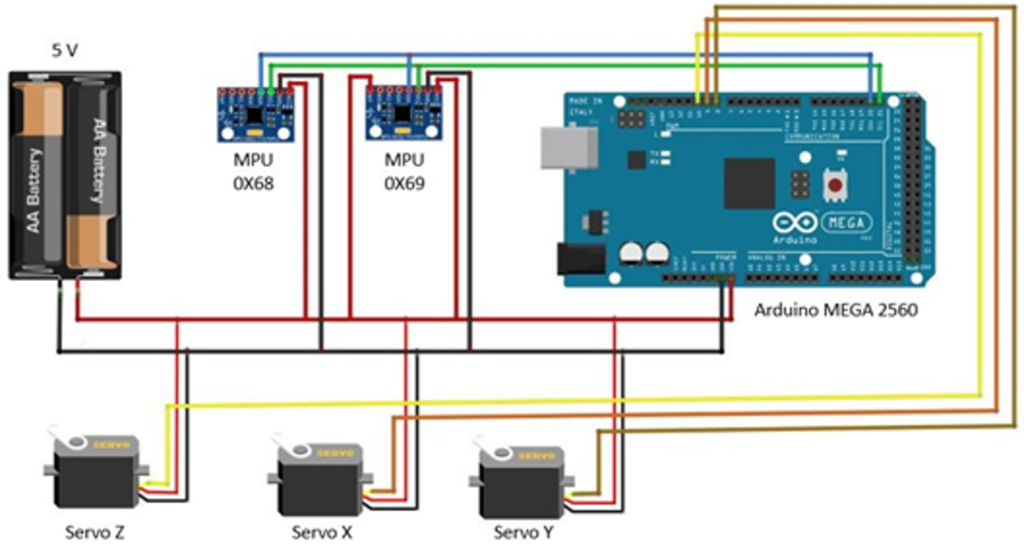
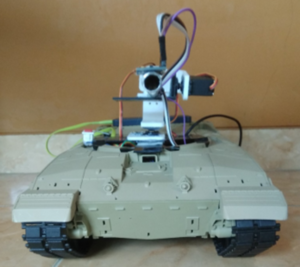
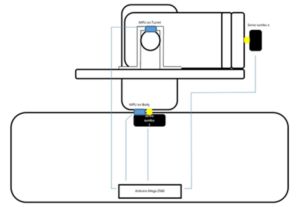
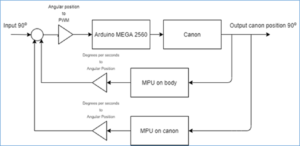
Kestabilan Posisi Meriam Pada Prototipe Tank Menggunakan Kontroler PID
Tank merupakan sebuah kendaraan yang banyak digunakan untuk berperang dan melindungi suatu negara. Hal tersebut dikarenakan tank merupakan kendaraan berlapis baja dan memiliki persenjataan untuk menghancurkan apapun yang ditargetkan oleh kendaraan ini. Tank dapat dioperasikan di daerah perkotaan, pedesaan, ladang maupun gurun sekalipun. Dengan banyaknya tempat yang dapat dilalui tank, itu berarti tank harus dapat dioperasikan di medan yang konsentrasi tanahnya berbeda-beda. Untuk itulah tank harus dapat menyesuaikan dengan keadaan tanah sekitar
Terdapat berbagai macam sistem kendali yang dapat digunakan pada tank dan salah satunya adalah Proportional Integral and Derivative (PID) yang merupakan sistem kendali klasik. Kelebihan daripada sistem kendali klasik tersebut adalah kesederhanaan dan kemudahan dalam penerapannya. Sistem kendali ini tidak membutuhkan komputer dengan daya komputasi tinggi karena kesederhanaan dari parameter sistem kendali tersebut. Untuk menstabilkan suatu sistem, sistem kendali PID sering digunakan karena kendali tersebut merupakan pengontrol yang baik digunakan untuk mereduksi osilasi pada sistem dan merupakan sistem kendali yang stabil
Peneliti yang terlibat dalam penelitian ini antara lain : 1. Dimas Farid Arief Putra – Mahasiswa Teknik Elektro 2. Ahmad Syahril Muharom – Teknik Elektro
Department Of Electrical Engineering
Fakultas Teknik & Informatika Universitas Multimedia Nusantara Jl. Scientia Boulevard, Gading Serpong Tangerang, Banten-15811, Indonesia